
 Este bloco serve para o Robô EV3!
Este bloco serve para o Robô EV3!
O bloco Obter Cor lhe permite amostrar os dados dos sensores de cor do robô.
O bloco Obter Cor comporta dois diferentes métodos de identificação de cor:
Obter.IdentificaçãoDeCor
Obter.Vermelho
Obter.IdentificaçãoDeCor
Usado para identificar cores, este método gera um valor numérico diferente para cada cor detectada.
Os ID de Cor são os seguintes:
| Cor | ID |
| Preto | 1 |
| Azul | 2 |
| Verde | 3 |
| Amarelo | 4 |
| Vermelho | 5 |
| Branco | 6 |
| Marrom | 7 |
Observe a tela HUD de perto e veja como os ID de Cor mudam conforme o robô alcança diferentes pontos coloridos no chão:
Observe que o sensor de cor não consegue identificar todas as cores, e pode se perder ao se deparar com cores não atribuídas.
Obter.Vermelho
Este método é usado para medir a intensidade da luz refletida. Como o preto absorve a luz, enquanto que o branco a reflete, o valor gerado consegue diferenciar cores claras de escuras. As cores escuras geram valores baixos até 0, enquanto que as cores claras geram valores altos até 100. Isso torna o método ObterVermelho ideal para seguimento de linha usando algoritmos de controle proporcional ou PID.
Você pode ainda usar o bloco Esperar até a Cor para pausar a programação até o robô detectar uma cor específica ou cruzar determinado limite.
Neste exemplo, o robô vai se deslocar para frente enquanto o sensor de cor estiver sobre uma superfície clara.
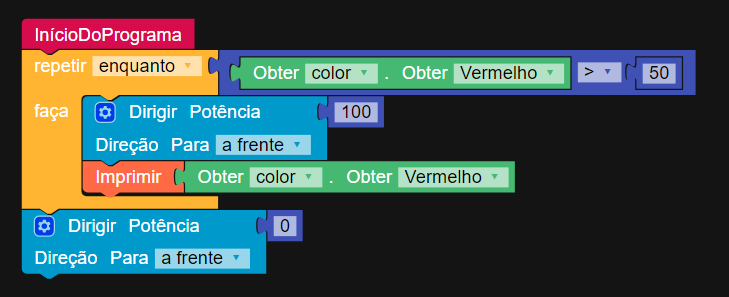
O programa também irá imprimir ao console o atual valor de intensidade da luz (0-100).
Comentários
iniciar sessão para comentar.