
 Este bloco serve para o Robô Ruby!
Este bloco serve para o Robô Ruby!
Os sensores do robô são configurados em várias portas predeterminadas em seu corpo, estando inicialmente apontados em uma ou em outra direção. Mas sempre é possível alterar a direção dos sensores, com o bloco Ajustar Rotação do Sensor.
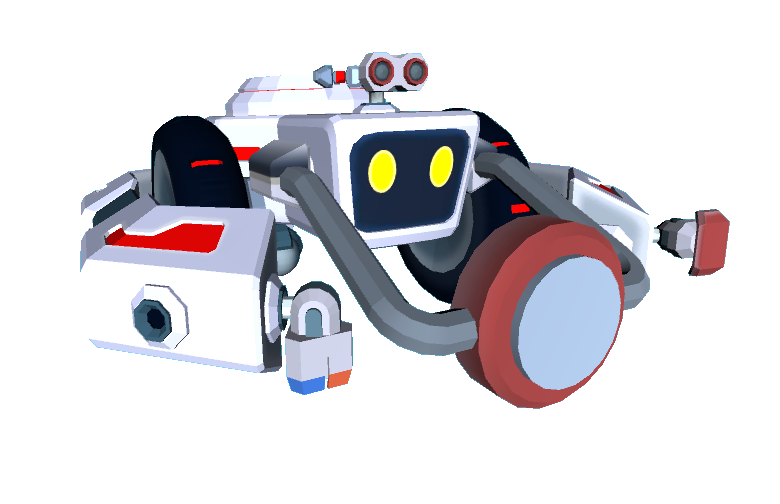
Alguns sensores são construídos com diversas articulações, como um braço humano. Imagine as articulações do ombro, do cotovelo e do pulso. Em robótica, as articulações são numeradas, começando com 0. Portanto, a primeira articulação, a “base”, seria o ombro (0), a próxima seria o cotovelo (1), e depois o pulso (2).
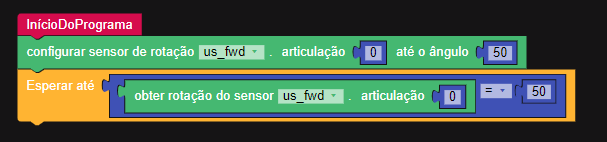
A Articulação 0
Neste exemplo de sensor ultrassônico colocado na parte superior do robô, a articulação 0 pode ser girada para os lados, permitindo que o robô “olhe em volta”.
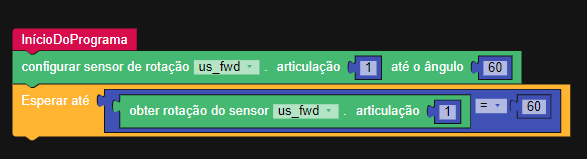
A Articulação 1
Neste exemplo de programação, alterar os valores da articulação 1 inclina o sensor ultrassônico para cima e para baixo, permitindo que o robô procure objetos no chão ou acima de sua cabeça.
Alguns sensores têm apenas um grau de rotação, caso em que você deverá usar somente a articulação 0.
Dica:
É melhor acompanhar um bloco Ajustar Rotação do Sensor com um bloco Esperar Até contendo um bloco Obter Rotação do Sensor e os mesmos valores que você inseriu no bloco Ajustar Rotação do Sensor.
Deste modo, você poderá ter certeza de que o robô completou o ajuste do ângulo de rotação do sensor antes de executar o restante da programação.
Comentários
iniciar sessão para comentar.