
 Este bloco serve tanto para o Robô EV3 quanto para o Robô Ruby!
Este bloco serve tanto para o Robô EV3 quanto para o Robô Ruby! 
O bloco Obter Sensor de Toque Pressionado lhe permite amostrar o estado dos sensores de toque do robô. É bastante útil para tocar objetos e saber quando parar de dirigir!
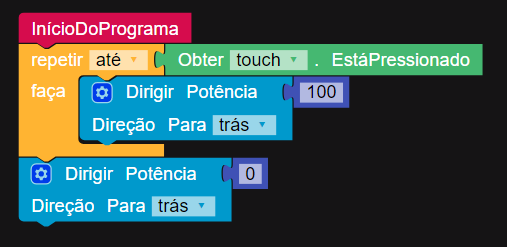
Neste exemplo de programação para o Robô EV3, o loop continuará até que a condição seja verdadeira, ou seja, até que o sensor de toque seja pressionado. Uma vez pressionado, o robô irá parar.
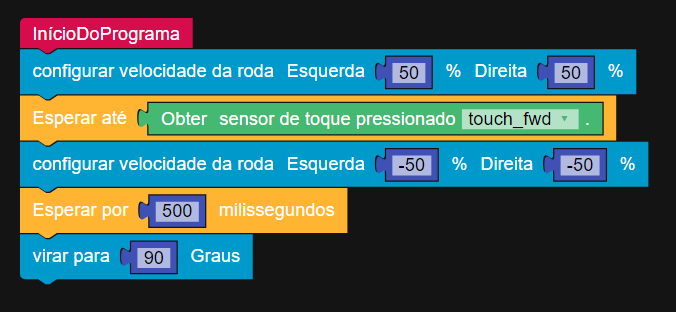
Neste exemplo de programação para o Robô Ruby, o robô vai se deslocar para frente até que o sensor de toque seja pressionado e, assim que o for, o robô vai se deslocar para trás por meio segundo antes de virar 90 graus à direita.
Obs.: O bloco Obter Sensor de Toque Pressionado também pode ser usado em um bloco de comparação e comparado a um bloco verdadeiro/falso ajustado para ‘verdadeiro’. O resultado será o mesmo.

Veja também:
Blocos Esperar até (EV3)
Comentários
iniciar sessão para comentar.