
 Este bloco serve para o Robô EV3!
Este bloco serve para o Robô EV3!
![]()
O bloco obterModoDistância amostra as leituras do sensor ultrassônico. Pode ser usado como um valor ou como uma condição em um loop, para agir de acordo com a distância do robô de um determinado objeto.
Neste exemplo de programação, o robô irá parar quando estiver a menos de 20 cm da parede:
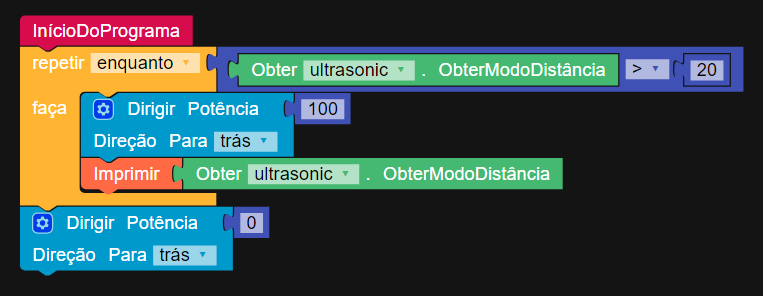
De bônus, adicionamos também um bloco Imprimir dentro do loop, para imprimir a distância atual até o console.
Comentários
iniciar sessão para comentar.