
Um sensor de toque é um simples botão de apertar que pode ser pressionado ou liberado. Os valores do sensor são representados por leituras verdadeiro/falso na tela HUD: pressionado = verdadeiro; liberado = falso.
Normalmente, esse sensor (ou sensores) é colocado na parte dianteira do robô, podendo ser usado para determinar quando parar de se deslocar. Por exemplo, assim que o robô chegar a uma parede ou outro objeto.
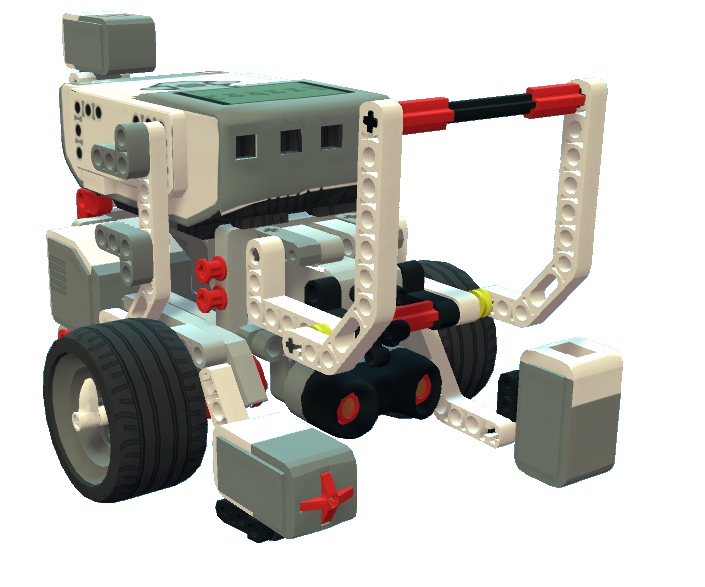 Veja o sensor de toque do Robô EV3 em ação:
Veja o sensor de toque do Robô EV3 em ação:
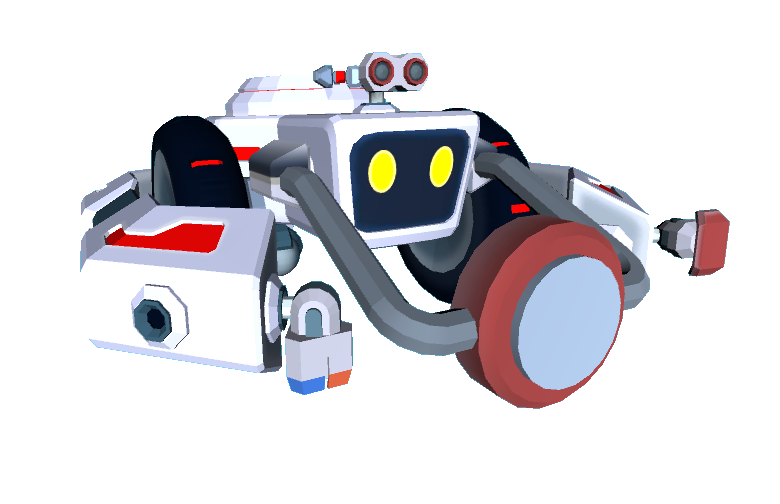 E aqui o do Robô Ruby:
E aqui o do Robô Ruby:
Veja também:
Bloco Obter Sensor de Toque Pressionado
Wait Until Touch (EV3)
Comentários
iniciar sessão para comentar.