
 Ce bloc fonctionne avec le robot Ruby !
Ce bloc fonctionne avec le robot Ruby !
Le bloc Régler la vitesse de la roue définit une vitesse cible pour les deux roues du robot. Il diffère du bloc Régler la puissance du moteur dans la mesure où il exécute un système de contrôle en boucle fermée constant en arrière-plan, maintenant une vitesse constante pour les roues du robot en appliquant la puissance appropriée du moteur afin d'atteindre et de maintenir la vitesse cible appliquée.

La vitesse de chaque roue peut être réglée individuellement.
Conduite droite
Pour conduire le robot en ligne droite, les deux moteurs doivent tourner à la même puissance et dans la même direction :
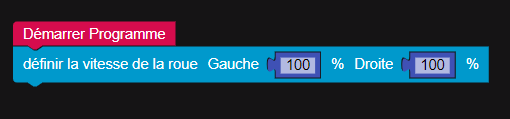

Les valeurs positives feront tourner le moteur vers l'avant, tandis que les valeurs négatives feront tourner le moteur en arrière.
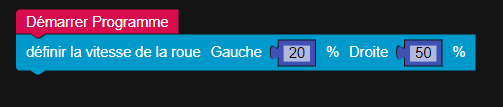
Faire tourner
Pour tourner, applique différentes valeurs aux roues.
Voici quelques exemples :
Différentes valeurs du même signe (positif ou négatif) entraîneront un virage en douceur dans la direction de la valeur inférieure :

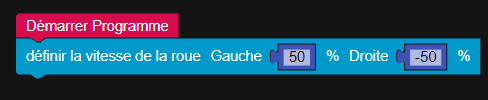
Des valeurs du même nombre mais de signe opposé (positif et négatif) entraîneront un virage en vis (parfois aussi appelé virage ponctuel, ou virage sur place) dans le sens du moteur tournant vers l'arrière.

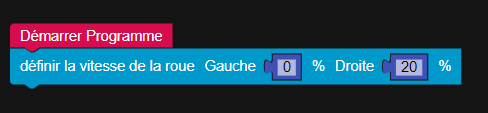
Une valeur 0 dans l'un des moteurs entraînera un virage pivot, où le robot tourne sur l'essieu de la roue dont le moteur est à une puissance 0 :
Commentaires
Vous devez vous connecter pour laisser un commentaire.