
Un capteur tactile est un simple bouton-poussoir qui peut être pressé ou relâché. Les valeurs du capteur sont représentées par des lectures vraies / fausses dans le HUD : pressé = vrai ; relâché = faux.
Ce capteur (ou ces capteurs) est généralement placé sur le devant du robot et peut être utilisé pour déterminer quand arrêter de rouler. Par exemple, une fois que le robot heurte un mur ou un autre objet.
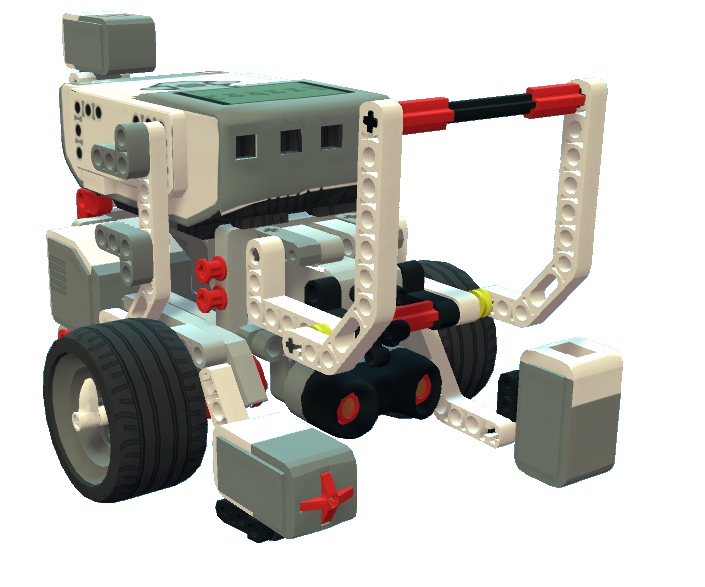 Voici le capteur tactile du robot EV3 en action :
Voici le capteur tactile du robot EV3 en action :
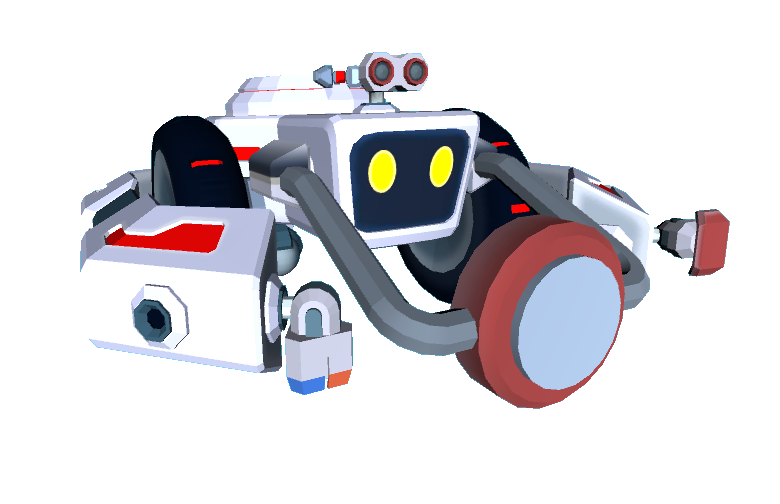 Et voici celui du robot Ruby :
Et voici celui du robot Ruby :
Voir aussi:
Commentaires
Vous devez vous connecter pour laisser un commentaire.