
Un sensor de contacto es simplemente un botón que puede estar presionado o suelto.
El sensor de contacto del EV3 no es distinto. Devuelve un valor de tipo booleano (verdadero o falso) dependiendo de su estado:
| Estado del sensor de contacto | Valor devuelto |
| Presionado | Verdadero |
| Suelto | Falso |
 Este bloque funciona con el robot EV3!
Este bloque funciona con el robot EV3!
Veamos hay un código de ejemplo:
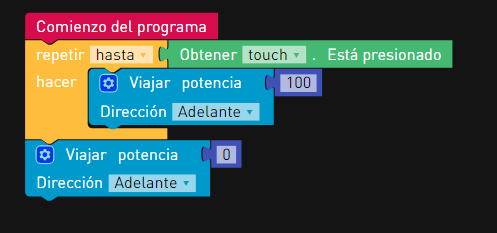
En este ejemplo, la condición until (hasta) se refiere al estado del sensor de contacto.
El bucle continuará hasta que la condición sea verdadera, o sea, hasta que el sensor de contacto esté presionado.
Esta es sólo una forma de hacer que el robot avance hasta que el sensor se tope con un obstáculo.
Comentarios
Inicie sesión para dejar un comentario.