
 This block works for Ruby Robot!
This block works for Ruby Robot!
A robot needs power for its motors in order to move. The Set Motor Power block powers the robot's two wheel-motors. Each motor can be powered individually.
Driving Straight
In order to drive the robot in a straight line, both motors must turn at the same power and in the same direction:


Positive values will turn the motor forward, while negative values will turn the motor backward.
Turning
In order to turn, apply different values to wheels.
Here are some examples:
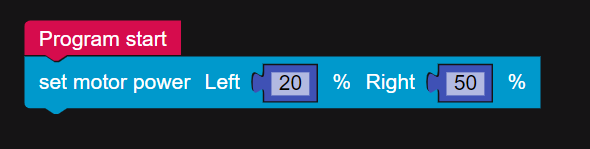
Different values of the same sign (positive or negative) will result in a smooth turn in the direction of the lower value:

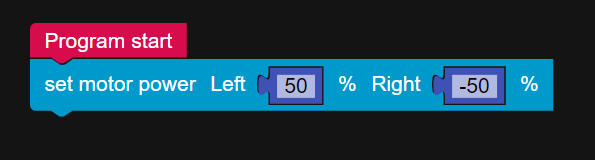
Values of the same number but the opposite sign (positive and negative) will result in a screw turn (sometimes also called a point turn, or a turn on the spot) in the direction of the motor turning backward.

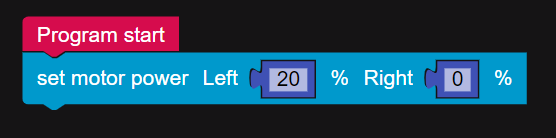
A 0 value in one of the motors will result in a pivot turn, where the robot spins on the axle of the wheel who's motor is at 0 power:
Yes, helpful!