
A touch sensor is a simple push button that can either be pressed or released. The sensor's values are represented by true/false readings in the HUD: pressed = true; released = false.
This sensor (or sensors) is usually placed on the robot's front, and can be used to determine when to stop driving. For example, once the robot hits a wall or some other object.
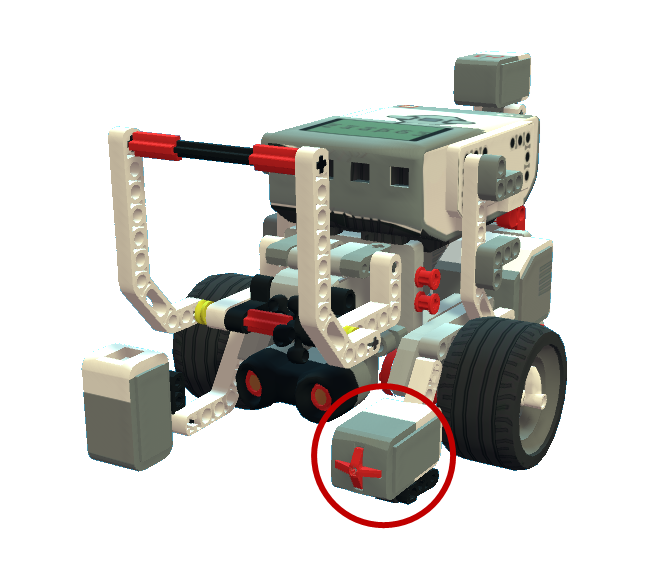
 Here is EV3 Robot's touch sensor in action:
Here is EV3 Robot's touch sensor in action:
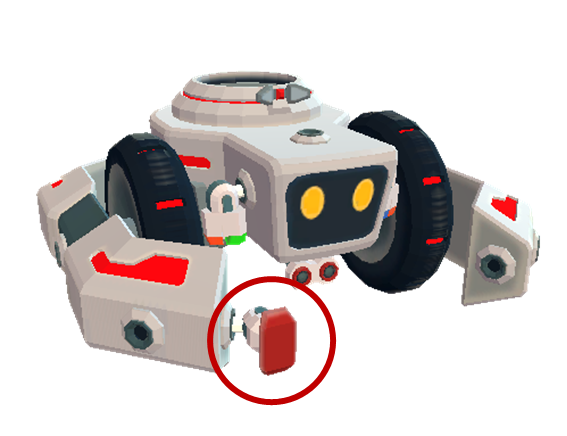
 And here is Ruby Robot's:
And here is Ruby Robot's:

See also:
Wait Until Touch (EV3)
This was helpful for me.
yes it was helpful